Ardupilot Upload Firmware Windows Subsystem for Linux
Consequence details
Delight depict the problem, or desired feature
I was having difficulty finding the Install Firmware page on my old install. I was attempting to install a "Custom" version of ArduPilot. (In this case my ain Ubuntu/waf build of ArduPlane). Since I couldn't go through the Install Firmware page, and so the Load Custom Firmware option I decided to reinstall Mission Planner. I reinstalled three ways, beginning from the Mission Planner Latest Installer, and then through the github link to the most contempo version, currently from this page selecting "MissionPlanner-1.3.63.msi" each fourth dimension I run into the same effect, When I plug in the device the COM port, in my instance COM4, flashes every bit available and and so disappears. I saw that this is commonly a driver issue and I fabricated sure all my driver were upwards to engagement through the device manager. At present I am unable to connect to my Pixhawk4 to flash my imitation custom firmware to test my power to modify the ArduPilot source lawmaking.
Additional Note: The initial install of Mission Planner on my machine was from the Microsoft Shop. After each iteration of an endeavor to fix my issue the previous version of Mission Planner was uninstalled using the Windows Add or Remove Programs tool. I did try to install my "custom" arduplane software through QGroundControl at one indicate flashing a .bin file to it, Since then I had attempted to flash the .APJ file from the new Mission Planners. I have no idea if they were successful, But the software seemed to carry out the flash nominally. I just couldn't connect or see the COM port afterwards, but I never tried to connect directly before flashing.
Version
What version was the consequence encountered with
Holybro Pixhawk4
ASUS Windows x Laptop
Mission Planner 1.three.63 built 1.three.7014.32511
Arduplane, Custom compiled firmware (I kept total notes for my project squad and I volition provide them below)
Platform
[ ] All
[ ] AntennaTracker
[ ] Copter
[Ten] Plane
[ ] Rover
[ ] Sub
Airframe type
What blazon of airframe (flying wing, glider, hex, Y6, octa etc)
Quadplane Octo Xish
I am attempting to customize this somewhen to let for an Octo "I" configuration. See my other issue report for more than information (ArduPilot/ardupilot#10809). If you are so inclined to help with the issues I commented at the terminate of the post I would GREATLY appreciate information technology.
Hardware type
What autopilot hardware was used? (pixhawk, pixracer, PX4FMU etc)
Holybro Pixhawk4
Logs
Delight provide a link to any relevant logs that show the issue
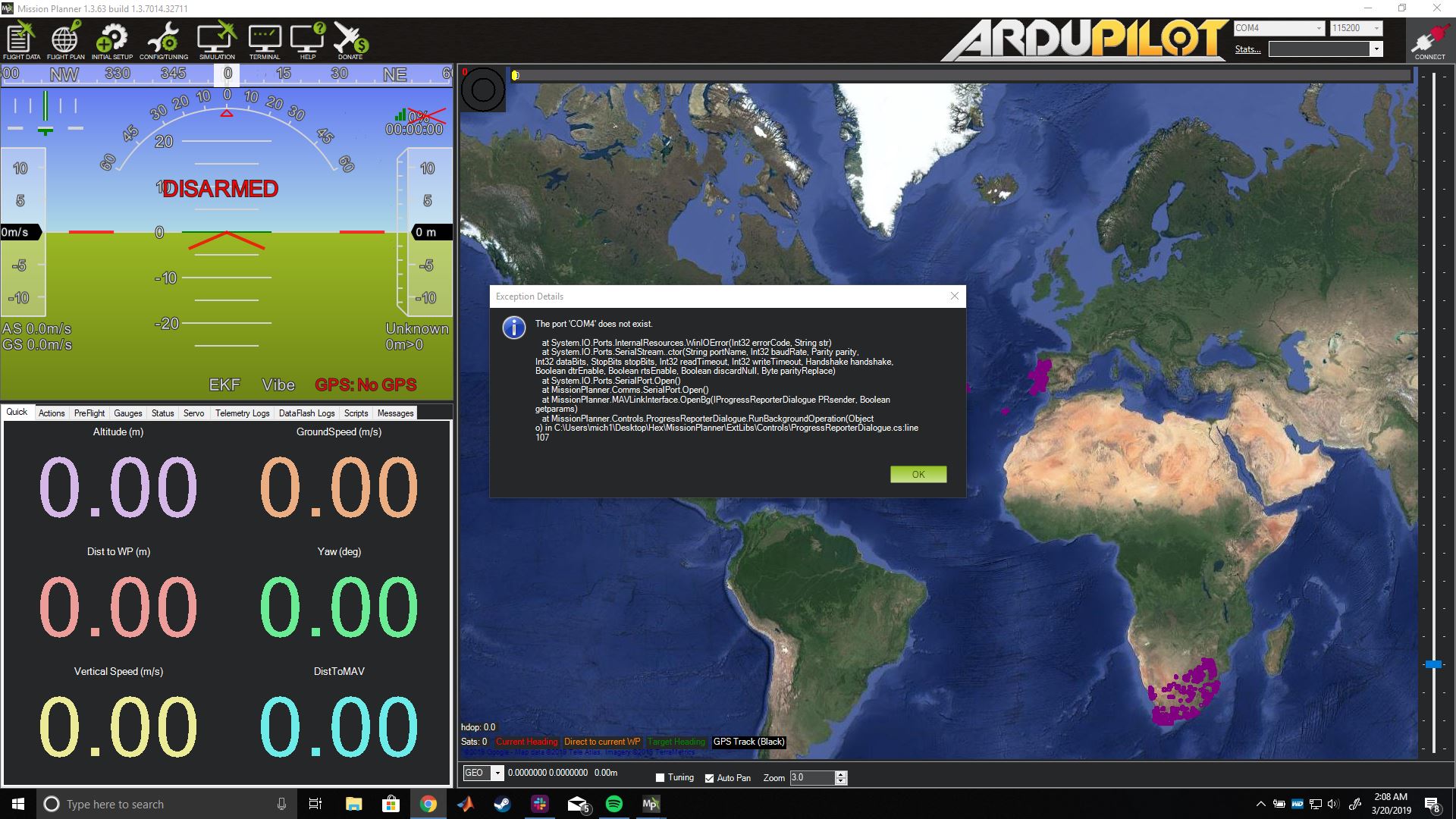
This is an image of my screen when I select the COM4 port when information technology appears and hit connect before information technology disappears, When COM4 appears I get the upbeat musical tone of connection and then when it disappears I become the down musical tone of disconnection.
As promised in a higher place here is every single step I took when building the firmware: (Let me know if you see an error)
Install Ubuntu on Windows 10
Be in Windows 10 64-bit version (Default)
Become to: Control Console>Programs>Turn Windows Features On Or Off
Enable "Windows Subsystem for Linux" and then hitting "OK"
Restart Estimator (Non necessary if Windows Subsystem for Linus already enabled)
Open up Microsoft Shop
Search "Ubuntu"
Install Ubuntu
Open Ubuntu after downloaded and permit to install
Fix your UNIX username and password, and remember them
Setting up the waf Build Environment on Windows 10 using WSL
Run "sudo apt-get update"
Enter your password
Run "sudo apt-get upgrade"
Enter "Y" to go along, Allow to install (Took approx vii minutes)
Enter "git clone https://github.com/ardupilot/ardupilot.git"
(may need to modify this address to our own address once nosotros accept customized code)
Enter "cd ardupilot"
Enter "git submodule init"
Enter "git submodule update --recursive" (Approx two minutes)
Enter "./Tools/scripts/install-prereqs-ubuntu.sh"
Enter "Y" (Approx 25 Minutes)
Enter your countersign when prompted and allow it continue to run.
Enter "y" when prompted
Enter "y" when prompted
Let to finish (Approx i minute)
Enter "nano ~/.profile"
Delete line "export PATH=/opt/gcc-arm-none-eabi-vi-2017-q2-update/bin:$PATH"
Hitting "Ctrl + O"
Hit "Enter"
Hit "Ctrl + X"
Enter "sudo apt-get install gcc-arm-none-eabi"
Enter "Y"
Permit to finish (Approx five minutes)
Enter ". ~/.profile" to reload the .contour script
Building With Waf
Enter "./waf configure --board sitl --debug"
Enter "./waf configure --board Pixhawk4"
Enter "./waf build sub"
Allow to cease (Approx 10 minutes)
Enter File Explorer and navigate to: C:\Users<username>\AppData\Local\Packages\CanonicalGroupLimited.UbuntuonWindows_79rhkp1fndgsc\LocalState\rootfs\home<username>\ardupilot\build\Pixhawk4\bin
You may have to go to the View tab and bank check the box for hidden items to run into AppData when you are in
From at that place you have access to the APJ files, which are causeless to be the firmware to be flashed
Source: https://github.com/ArduPilot/MissionPlanner/issues/2103
0 Response to "Ardupilot Upload Firmware Windows Subsystem for Linux"
Post a Comment